
Penggerak pneumatik ialah penggerak yang menggunakan tekanan udara untuk memacu pembukaan, penutupan atau pengawalseliaan injap. Ia juga dipanggil penggerak pneumatik atau peranti pneumatik. Penggerak pneumatik kadangkala dilengkapi dengan peranti tambahan tertentu. Yang biasa digunakan ialah penentu kedudukan injap dan mekanisme roda tangan. Fungsi penentududuk injap adalah menggunakan prinsip maklum balas untuk meningkatkan prestasi penggerak supaya penggerak dapat mencapai kedudukan yang tepat mengikut isyarat kawalan pengawal. Fungsi mekanisme roda tangan adalah untuk menggunakannya untuk mengendalikan terus injap kawalan untuk mengekalkan pengeluaran normal apabila sistem kawalan gagal disebabkan oleh gangguan kuasa, gangguan gas, tiada output pengawal atau kegagalan penggerak.
Prinsip Kerja Penggerak Pneumatik
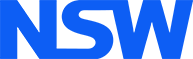
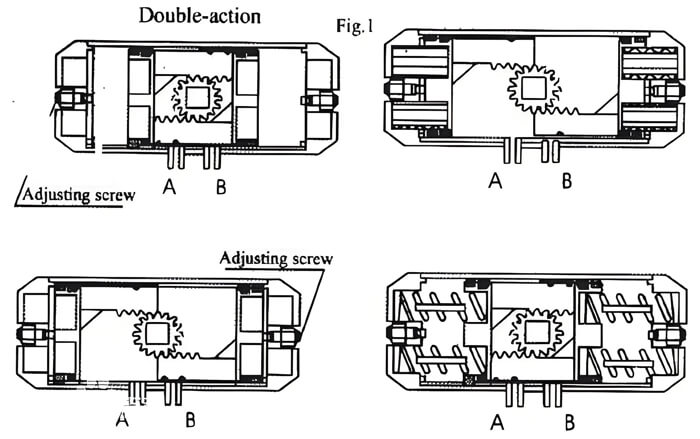
Apabila udara termampat memasuki penggerak pneumatik dari muncung A, gas menolak omboh berganda untuk bergerak secara linear ke arah kedua-dua hujung (hujung kepala silinder), dan rak pada omboh memacu gear pada aci berputar untuk berputar 90 darjah lawan jam, dan injap dibuka. Pada masa ini, gas di kedua-dua hujung penggerak pneumatik dilepaskan dari muncung B. Sebaliknya, apabila udara termampat memasuki kedua-dua hujung penggerak pneumatik dari muncung B, gas menolak omboh berganda untuk bergerak secara linear di tengah, dan rak pada omboh memacu gear pada aci berputar, dan injap tertutup mengikut arah 90 darjah. Pada masa ini, gas di tengah-tengah penggerak pneumatik dilepaskan daripada muncung A. Di atas adalah prinsip penghantaran jenis standard. Mengikut keperluan pengguna, penggerak pneumatik boleh dipasang dengan prinsip penghantaran yang bertentangan dengan jenis standard, iaitu, paksi yang dipilih berputar mengikut arah jam untuk membuka injap, dan berputar lawan jam untuk menutup injap. Muncung A bagi penggerak pneumatik bertindak tunggal (jenis pemulangan spring) ialah salur masuk udara, dan muncung B ialah lubang ekzos (muncung B hendaklah dipasang dengan peredam). Salur masuk muncung A membuka injap, dan daya spring menutup injap apabila udara terputus.
Prestasi Penggerak Pneumatik
1. Daya keluaran terkadar atau tork peranti pneumatik hendaklah mematuhi peraturan antarabangsa dan pelanggan
2. Dalam keadaan tanpa beban, silinder dimasukkan dengan tekanan udara yang dinyatakan dalam “Jadual 2″, dan pergerakannya hendaklah lancar tanpa jamming atau menjalar.
3. Di bawah tekanan udara 0.6MPa, tork keluaran atau tujahan peranti pneumatik dalam kedua-dua arah pembukaan dan penutupan hendaklah tidak kurang daripada nilai yang ditunjukkan pada papan nama peranti pneumatik, dan tindakan itu hendaklah fleksibel, dan tiada ubah bentuk kekal atau fenomena luar biasa lain akan berlaku di mana-mana bahagian.
4. Apabila ujian pengedap dijalankan dengan tekanan kerja maksimum, jumlah udara yang bocor dari setiap bahagian tekanan belakang tidak boleh melebihi (3+0.15D)cm3/min (keadaan standard); jumlah udara yang bocor dari penutup hujung dan aci keluaran tidak boleh melebihi (3+0.15d)cm3/min.
5. Ujian kekuatan dijalankan dengan 1.5 kali tekanan kerja maksimum. Selepas mengekalkan tekanan ujian selama 3 minit, penutup hujung silinder dan bahagian pengedap statik tidak dibenarkan mengalami kebocoran dan ubah bentuk struktur.
6. Bilangan hayat tindakan, peranti pneumatik mensimulasikan tindakan injap pneumatik. Di bawah syarat mengekalkan tork keluaran atau kapasiti tujahan dalam kedua-dua arah, bilangan operasi buka dan tutup tidak boleh kurang daripada 50,000 kali (satu kitaran buka-tutup).
7. Untuk peranti pneumatik dengan mekanisme penampan, apabila omboh bergerak ke kedudukan akhir lejang, hentaman tidak dibenarkan.
Kelebihan Penggerak Pneumatik
1. Terima isyarat gas berterusan dan anjakan linear keluaran (selepas menambah peranti penukaran elektrik/gas, ia juga boleh menerima isyarat elektrik berterusan). Sesetengah boleh mengeluarkan anjakan sudut selepas dilengkapi dengan lengan goyang.
2. Terdapat fungsi tindakan positif dan negatif.
3. Kelajuan bergerak adalah tinggi, tetapi kelajuan akan menjadi perlahan apabila beban meningkat.
4. Daya keluaran adalah berkaitan dengan tekanan operasi.
5. Kebolehpercayaan yang tinggi, tetapi injap tidak boleh dikekalkan selepas sumber udara terganggu (ia boleh dikekalkan selepas menambah injap menjaga kedudukan).
6. Adalah menyusahkan untuk merealisasikan kawalan bersegmen dan kawalan program.
7. Penyelenggaraan yang mudah dan kebolehsuaian yang baik kepada alam sekitar.
8. Kuasa keluaran yang besar.
9. Ia mempunyai fungsi kalis letupan.
Dalam Summery
Dimensi pemasangan dan sambungan penggerak dan injap pneumatik direka mengikut piawaian antarabangsa ISO5211, DIN3337 dan VDI/VDE3845, dan boleh ditukar ganti dengan penggerak pneumatik biasa.
Lubang sumber udara mematuhi piawaian NAMUR.
Lubang pemasangan aci bawah penggerak pneumatik (mematuhi piawaian ISO5211) adalah segi empat sama dua, yang sesuai untuk pemasangan injap bersudut linear atau 45° dengan rod segi empat sama.
Masa siaran: Feb-16-2025